在学校里经常有学弟向我咨询学院开设的一些设计课程的相关内容,所以我觉得有必要写几篇文章详细展示一下课程的内容、难度以及我的感想。我看到 2019 级本科生培养方案中,已经把「专业认知实习」课程并入了「光电导论」课程,「光学系统设计」和「电子系统设计」课程二选一,也就是说在大一和大二的暑假都只需要修一门课程,这是比较不错的课程调整。这篇文章原本应该在《光电学院短学期结束》之前发布,因为「光机结构设计」是我们专业的第一门设计类课程,也是我的第一门暑假短学期课程(我用科研夏令营替换了「专业认知实习」课程)。不过之前一直忙着各种事务,把这篇文章一拖再拖,直到现在才有机会写完。
课程简介
这门课程简单来说就是了解一些光学器件的结构、掌握仪器加工的方法,深入学习 SolidWorks 软件的使用,小组合作在一周内完成任意一个设计作品。由于当时还没有学习光学课程,所以并没有要求必须设计光学仪器。但是设计出来的产品要有技术指标和参数说明、工程图纸、应力分析、成本估算等等一个产品基本具备的东西。
这门课的上课时间是在 9 月份开学前。当大一的小伙伴们入学军训的时候,我们就在学校机房里进行上课。在设计该项产品之前,还会有一系列的软件基础教学、小型的课堂练习,比如设计一个茶壶,设计一个超辐射发光二极管,拆卸四倍镜并研究它的内部结构,对它进行建模并改进设计,这里就不再详细说明。我觉得这门课程是比较容易学习的,如果要问我哪里比较难学的话,我会说是 SolidWorks 软件的安装。如果你的计算机配置比较菜的话,在这门课上有些吃亏。还有,记得给你的计算机配个鼠标,像我这种常年不用鼠标只用触控板的,就很难控制软件的视图方向。
下面我会详细展示我们小组的设计:一款十分奇葩的折叠式智能跟随拍摄器。可能是因为过于奇葩,我们还评选上了这门课程的优秀设计二等奖。
产品设计
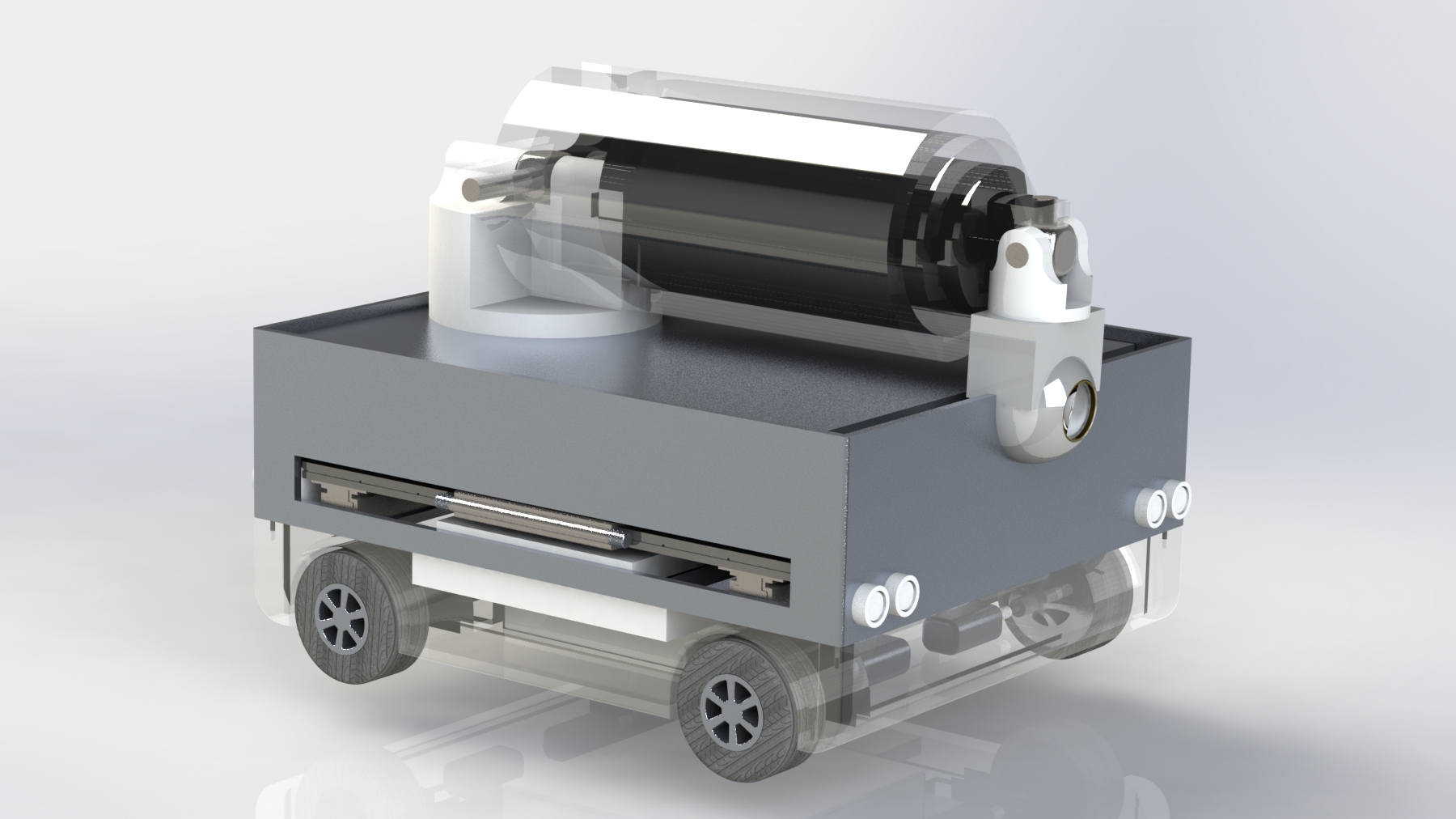
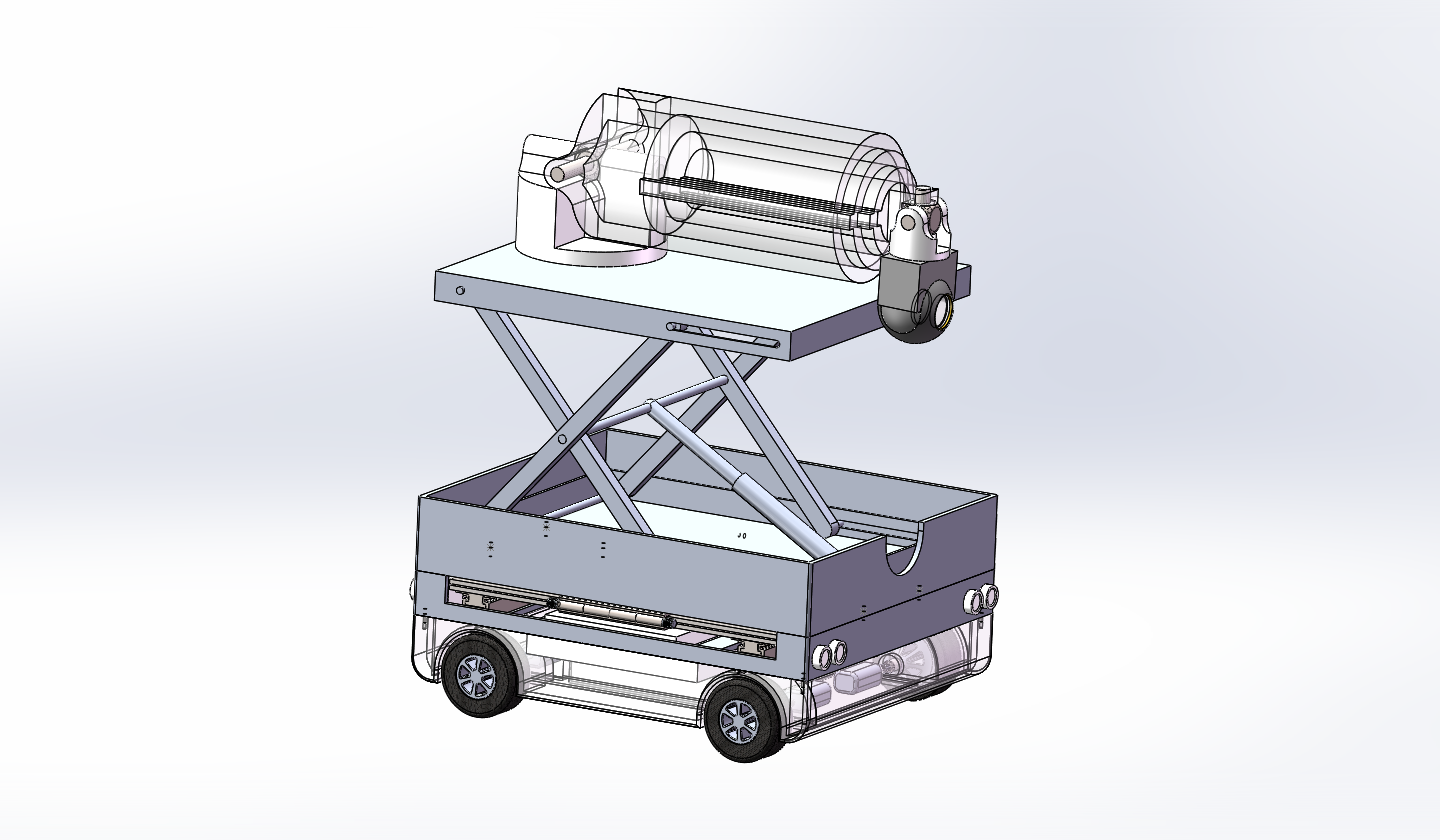
当初想到设计这样一款产品纯属偶然,我们小组为了避免和其他组撞题,想到了镜头设计,折叠收纳,再加上我们学过 Arduino 电子设计,想要给产品加上传感器之类的东西,这些元素组合在一起,就诞生了这款产品。组内设计分工方面,主要分为三部分内容,一是镜头设计,二是伸缩杆设计,三是底座设计。底座设计是重中之重,因为底座结构是我构思出来的,所以我就负责这一部分的设计,这里涉及到了比较复杂,难以设计的结构,交给别人设计我也不太放心。由于设计时间和能力有限,我们没有设计完成内部的电路和电子器件的设计,对于电子器件,仅仅使用一个个方块替代;为了展示内部结构,底座和伸缩杆使用了透明材质。最终渲染图如下所示:
基本功能:
能实现移动跟随、自动避障、不用时可折叠收缩体积、镜头装置可旋转多角度拍摄、可充电或者太阳能补充供电等。
技术指标和参数:
- 摄像镜头可达到最高高度:1m;
- 镜头可旋动角度:上下 180° 及左右 180°;
- 太阳能板规格:20cm×30cm×4;
- 避障:超声波传感器;
- 驱动:四轮驱动。
设计约束:
- 体积(折叠后):25cm×30cm×20cm;
- 预计质量:8kg;
- 使用环境:室内外相对平坦的地面,环境温度常温,不适用于大风、雨雪等恶劣天气;
- 强度:底座可承受 10kg 的压力。
镜头设计
 ※ 镜头
※ 镜头
设计成球形镜头以增加美观度和灵活程度,镜头与底座之间利用卡槽链接,该镜头可以沿着水平轴上下旋转,底座也可以利用伸缩杆连接处进行水平旋转,主要材料是 ABS。因为在本课程学习阶段并未学习应用光学有关知识,所以对于镜头只进行了粗略的设计。
伸缩杆设计
 ※ 伸缩杆
※ 伸缩杆
伸缩杆共 4 层支撑杆,与底座连接处可旋转 90°,与摄像头连接处可旋转 180°,主要材料是 ABS+PC。伸缩杆可通过转轴与底座保持平行或垂直,套杆的结构用了凹槽轨道的设计并在外预留出了一定长度方便拉伸;与相机连接处可旋转 180°,保证相机拍摄时转动以及折叠时将其折入底座内。
镜头和伸缩杆的设计我认为有些「水」过头了……要是我自己设计的话肯定不会设计得这么简单。
底座设计
底座是整个产品中最为复杂的部分,因为涵盖了四轮驱动装置、定位装置、太阳能装置、升降架这四大部分,而且需要考虑空间分布与合理展开与收纳。为了追求细节,我自己独立设计了三十多个零件。底座采用四轮驱动前行,长 30cm 宽 25cm 高 15cm, 主要材料是 6061 铝合金。这里我对几个比较重要的零件进行详细的展示。
 ※ 底座零件
※ 底座零件
首先是驱动底盘。驱动底盘需要装配上车轮、电机、电池以及核心控制模块,所以在外形设计上比较复杂。底部的小孔为预留的充电接口。
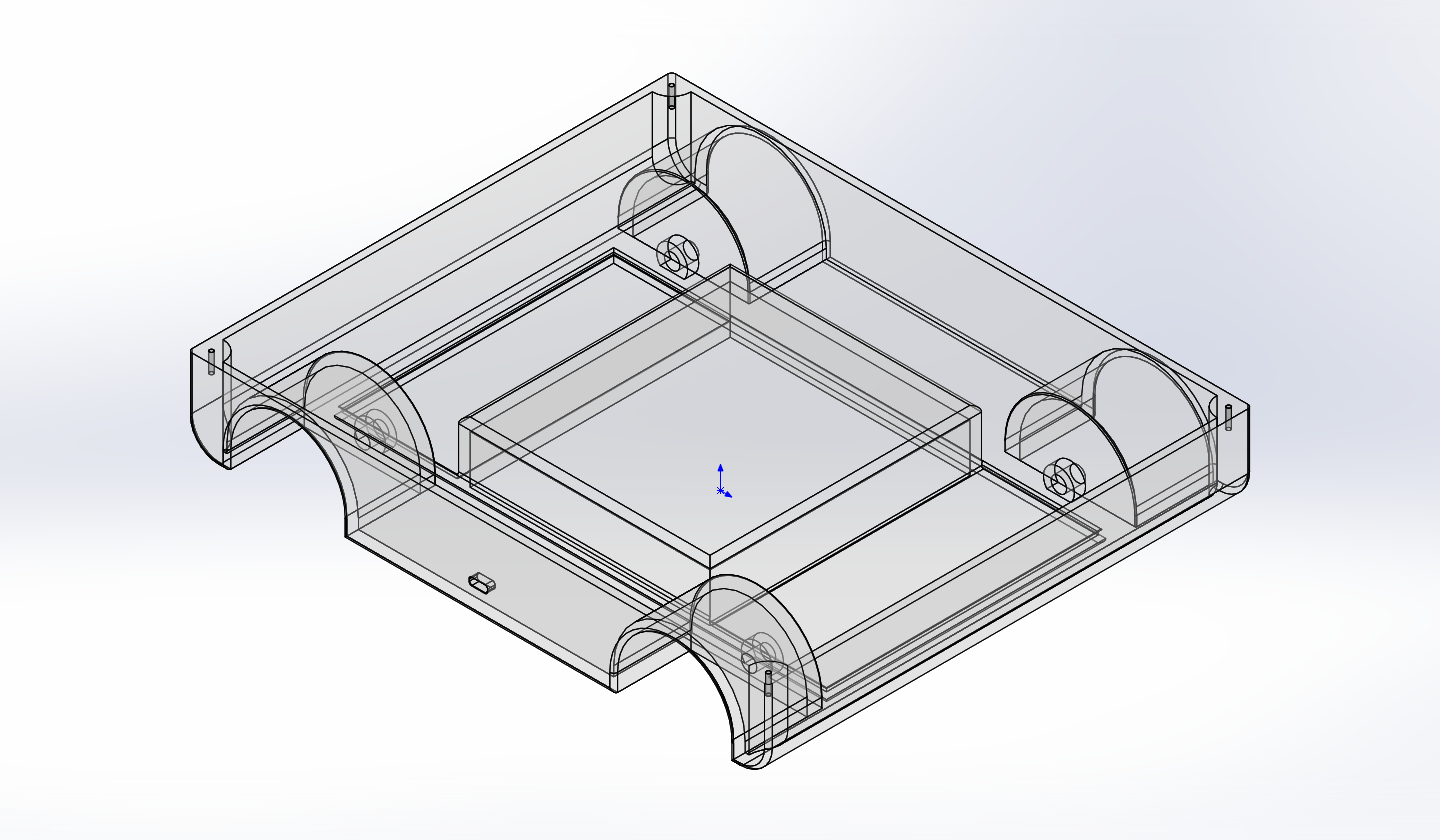 ※ 驱动底盘
※ 驱动底盘
车轮直径 56mm,电机与车轮直接相连。车轮轴与车壳相接处安放了滚珠轴承,减少摩擦阻力。车轮的设计灵感来自于迷你四驱车。
 ※ 车轮
※ 车轮
底座的第二层安放有超声波定位装置,并安装了太阳能电池板。为了在不那么科学的设计中讲究一点科学,我对几种定位装置进行了对比:
| 定位技术 | 优势 | 劣势 |
|---|---|---|
| GPS | 精度高、实时性好、抗干扰能力强 | 仅适用室外定位且能耗大、成本高 |
| IR | 短距离定位精度较高 | 视距传输、抗干扰能力差 |
| UWB | 精度高、实时性好、能耗低 | 造价高、抗干扰能力差 |
| RFID | 精度高、非视距、成本低 | 实时性差、安全性差 |
| 超声波 | 精度较高,结构简单、成本低 | 多径效应 |
通过对定位精度,能耗,成本,使用便捷程度进行分析,我决定采用超声波定位。在定位的时候,采用三边测量(Trilateration)定位算法,通过安放在安放在四角的超声波定位装置,对携带超声波发射器的人进行距离测量,即可确定人的具体位置。
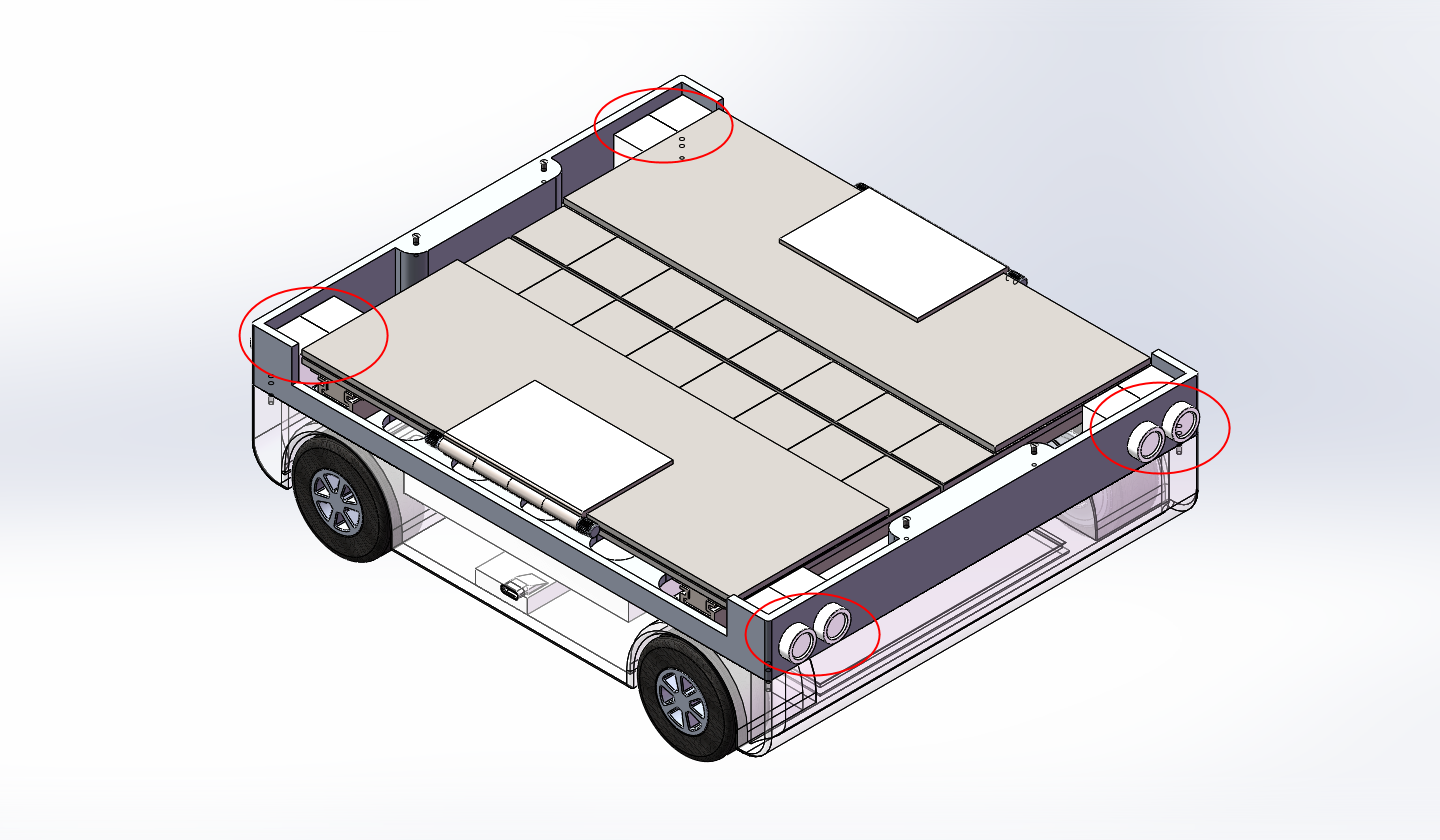 ※ 超声波定位模块
※ 超声波定位模块
太阳能电池板可以沿着滑动轨道伸出并展开。太阳能电池板大小规格为 12×25cm 和 9×25cm, 通过太阳能电池板生成的电力会储存到底部的电池中。由于太阳能板面积比较小,这部分的电能只是作为补充电能使用。
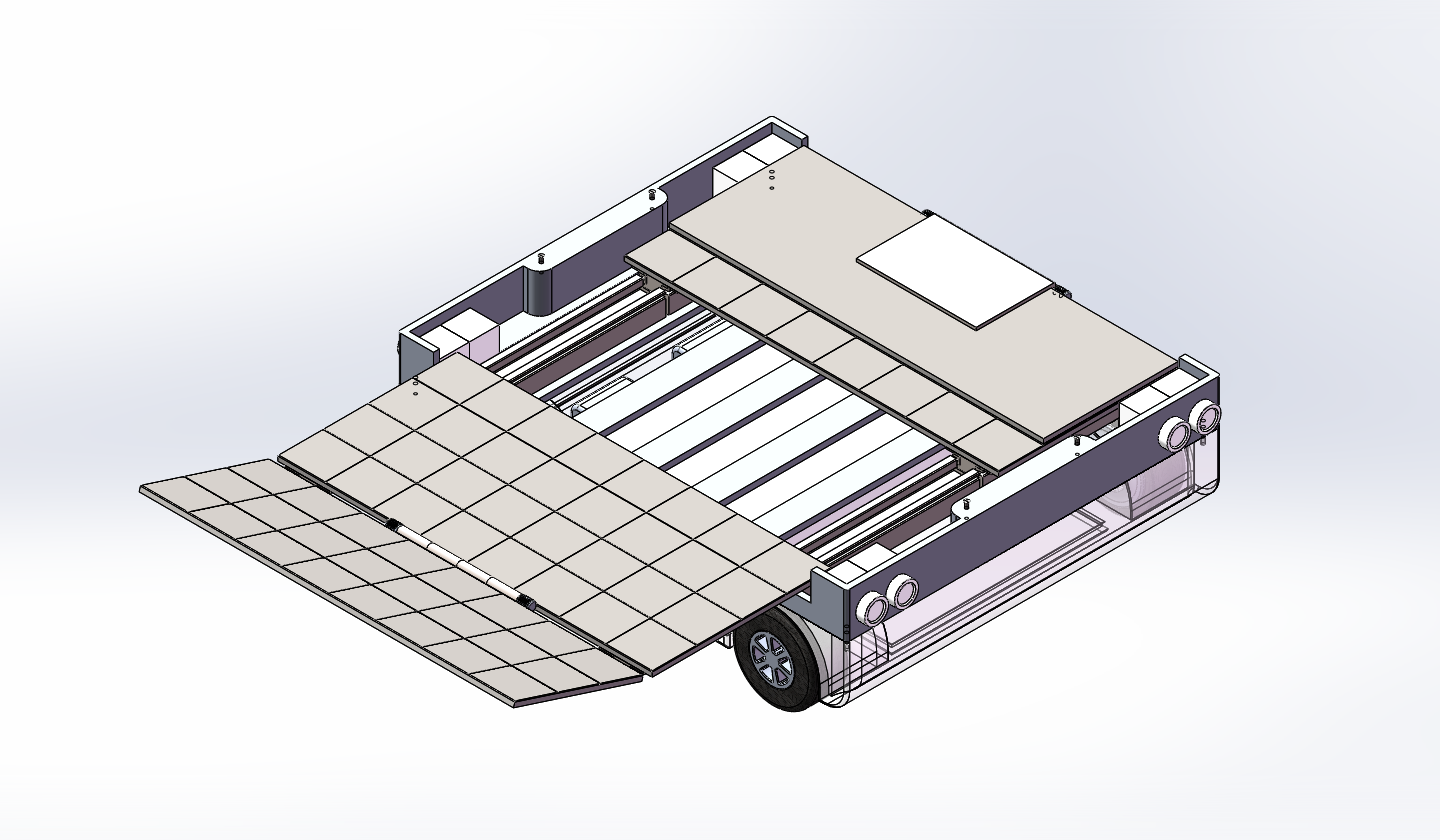 ※ 太阳能电池板
※ 太阳能电池板
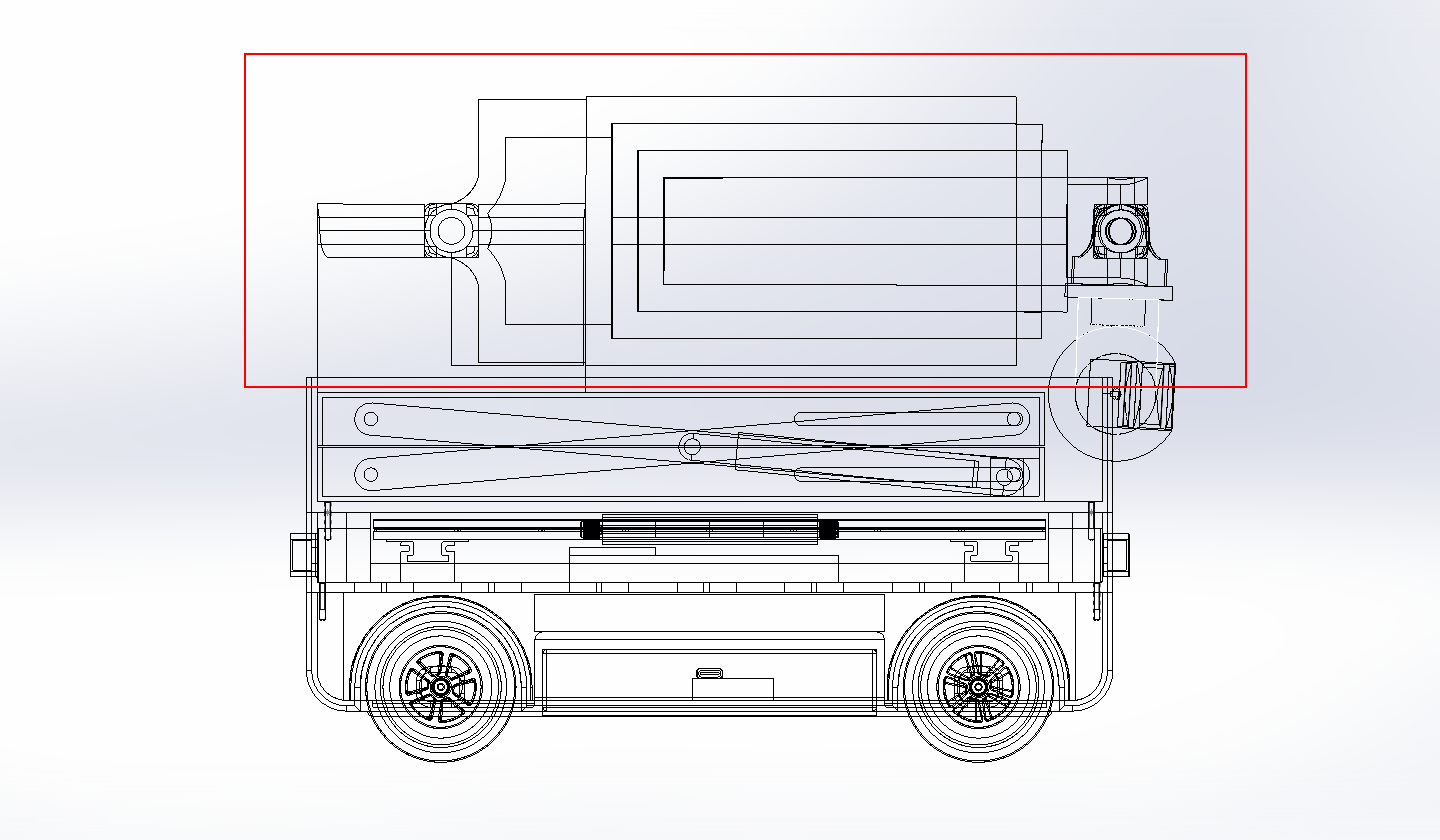
底座的第三层是安放伸缩杆的地方,为了达到计划高度,增设了一个升降架,通过液压活塞控制升降架的高度对整体高度进行进行再次调整。升降架底座的面积为 27×24cm,可上升高度为 19.8cm。这一部分是最让我头痛的设计,因为我之前并没有研究过升降架的结构,由于需要组合装配体,在支架长度和伸缩控制方面设计了很长时间。
 ※ 升降架
※ 升降架
一些设计缺陷:
- 设计时没有考虑完善,导致伸缩杆因底座长度受限而无法达到预期最大长度,所以做了底座升降架进行弥补;
- 摄像头内只用了最简单的镜头表示,并没有考虑变焦等功能;
- 电机、感应部分等控制模块只用了长方体简单表示,预留出设计部位,并没有对其进行更深一步的设计;
- ……
课程感想
这门课程如果想要拿到高分,就需要认真对待最后的设计作业,设计的产品不一定非要符合实际生活,但必须要有想象力和创造力。只要能将产品设计到位,注意一些细节方面的设计,比如螺丝钉的位置、镜头的压圈、联动装置设计、材料的使用等等,只要有设计上的「亮点」,有吸引人的地方,最终的总评成绩一定不会差。
因为是小组合作,为了避免组内矛盾和组员「划水」现象的发生,我建议在开课前就进行组队——以我多年的经验来看,老师应该会进行自由组队的。
在 SolidWorks 软件使用上,我觉得关键在于自学,不要太依赖老师在课堂上讲的内容,因为老师讲的只是理论知识,和实际操作还是有一定区别的。每天课程结束后回到宿舍,应该对当天的内容及时巩固练习,抓紧时间熟悉软件的各项功能。
我认为设计类的课程都很有必要认真学习的,因为通过这类课程可以锻炼一些软件的使用技能,比如这门课程的 SolidWorks、「光学系统设计」的 Zemax、「电子系统设计」的 Altium Designer……这对于今后的工作一定会有帮助。